一、Perceptron Hypothesis Set
例子:
银行要决定是否给使用者发信用卡。
可以将每一个使用者的各种信息作为一个向量,每一个维度使用来表示,给每个不同特征给予不同的权重,将加权值的和作为输出,设置一个阈值,如果超过阈值,那么就输出1,如果小于阈值,就输出-1.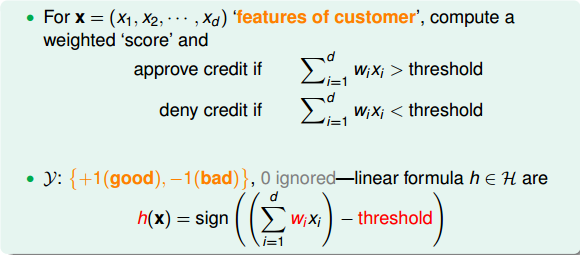
我们输入的x是向量,那么我们使用向量。并且将threshold也作为来简化运算过程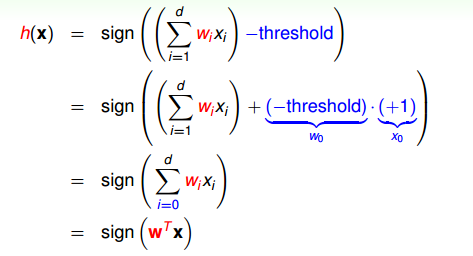
我们绘制一个二维图像来描述。圈代表1,叉代表-1,表示y的值。x只有两个维度的情况可以简单地画出来。这时的h(x)用一条直线将平面分成了两个部分,一部分为h(x)=1,另一部分为h(x)=−1。每个h都对应了一种分割方式。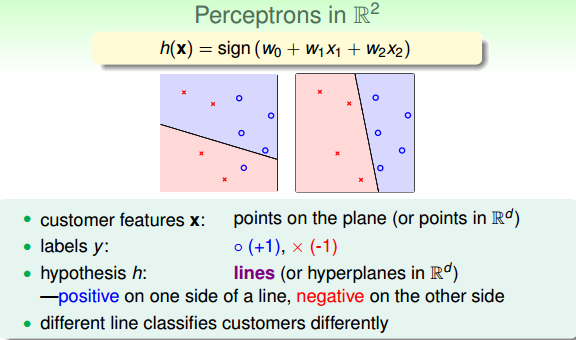
那么,我们所说的Perceptron,实际上上就是一条直线,我们称之为linear(binary) classifiers(线性分类器)。在更高维度中,同样支持。
同时,需要注意的是,这里所说的linear(binary) classifiers是用简单的感知器模型建立的,线性分类问题还可以使用logistic regression来解决,后面将会介绍。
二、Perceptron Learning Algorithm(PLA)
根据上一部分的介绍,我们已经知道了hypothesis set由许多条直线构成。我们希望将所有的正类和负类完全分开,也就是找到最好的g,使。
但是这样是很困难的,因为我们的f是未知的,我一我们可以将问题转化为找到最好的f。
我们有无限多条线,但是我们可以选择一条线,然后逐步修正,逼近最好答案。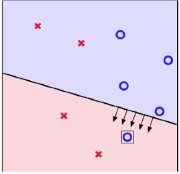
我们使用作为初始的线
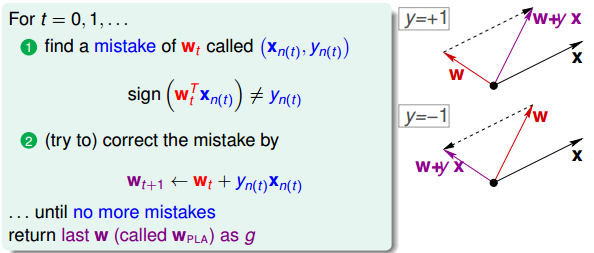
循环下面操作:
- 找出线下某一错误点称为(下标t表示在哪一轮)
- 用错误的线做内积运算
计算w与x内积,即w_x_cos<w,x>,作用在sign()函数上只有cos起作用,即夹角。
- 进行修正

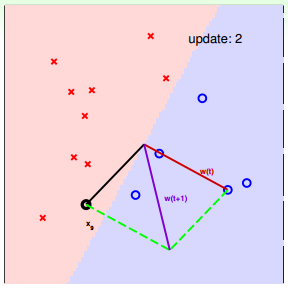
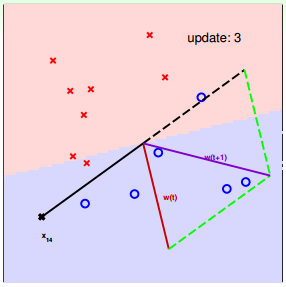
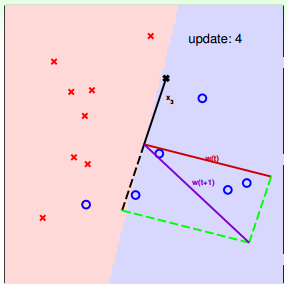
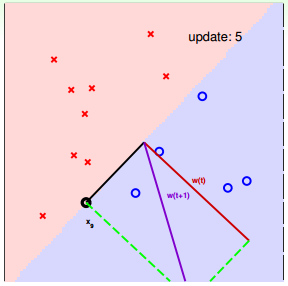
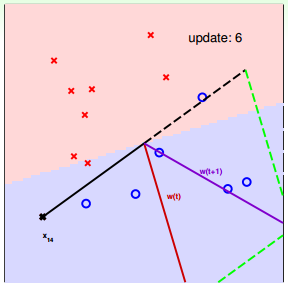
下面介绍一下PLA是怎么做的。首先随机选择一条直线进行分类。然后找到第一个分类错误的点,如果这个点表示正类,被误分为负类,即w_t^Tx_{n(t)}<0,那表示w和x夹角大于90度,其中w是直线的法向量。所以,x被误分在直线的下侧(相对于法向量,法向量的方向即为正类所在的一侧),修正的方法就是使w和x夹角小于90度。通常做法是,如图右上角所示,一次或多次更新后的与x夹角小于90度,能保证x位于直线的上侧,则对误分为负类的错误点完成了直线修正。
如果是误分为正类的点,即w_t^Tx_{n(t)}>0,那表示w和x夹角小于90度,其中w是直线的法向量。所以,x被误分在直线的上侧,修正的方法就是使w和x夹角大于90度。通常做法是,如图右下角所示,一次或多次更新后的与x夹角大于90度,能保证x位于直线的下侧,则对误分为正类的错误点也完成了直线修正。
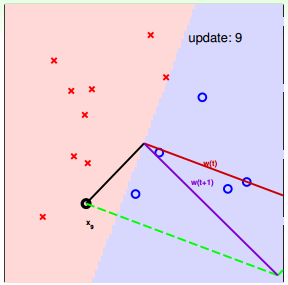
遇到个错误点就进行修正,不断迭代。要注意一点:每次修正直线,可能使之前分类正确的点变成错误点,但是只要不断进行迭代,对于线性分类模型,最后总会找到的一个合适的直线能够刚好分开。
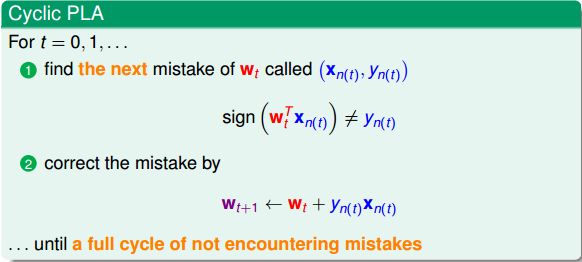
实际操作中,可以一个点一个点地遍历,发现分类错误的点就进行修正,直到所有点全部分类正确。这种被称为Cyclic PLA。
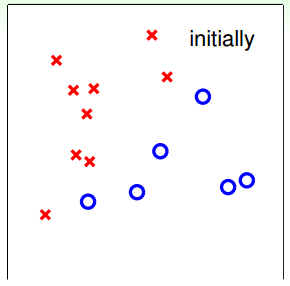
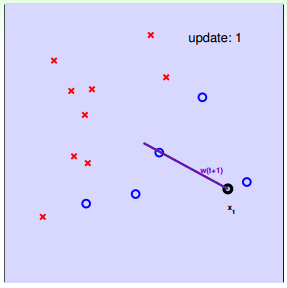
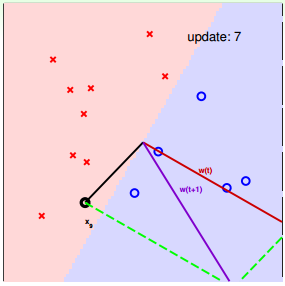
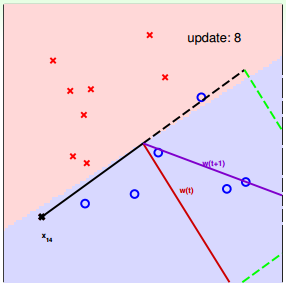
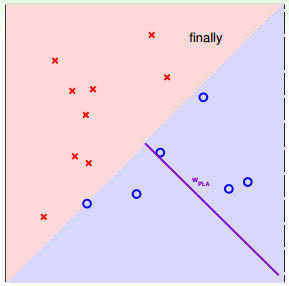
下面用图解的形式来介绍PLA的修正过程:
红线代表表示分割线的法线,正方向为法方向。
问题: - 这种方法一定会停下来吗?
- 假设停下来了,是否等于?
三、Guarantee of PLA
PLA什么时候会停下来?根据PLA的终止条件是,找到一条直线,能将所有平面上的点都分类正确,那么PLA就停止了。要达到这个终止条件,就必须保证D是线性可分(linear separable)。如果是非线性可分的,那么,PLA就不会停止。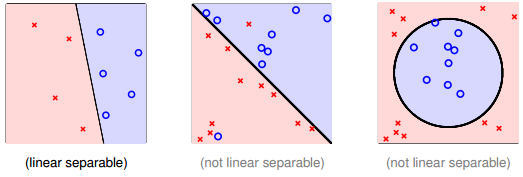
对于线性可分的情况,如果有这样一条直线,能够将正类和负类完全分开,令这时候的目标权重为,则对每个点,必然满足,即对任一点:
PLA会对每次错误的点进行修正,更新权重的值,如果与越来越接近,数学运算上就是内积越大,那表示是在接近目标权重,证明PLA是有学习效果的。所以,我们来计算与的内积: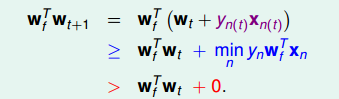
从推导可以看出,与的内积跟与的内积相比更大了。似乎说明了更接近,但是内积更大,可能是向量长度更大了,不一定是向量间角度更小。所以,下一步,我们还需要证明与向量长度的关系: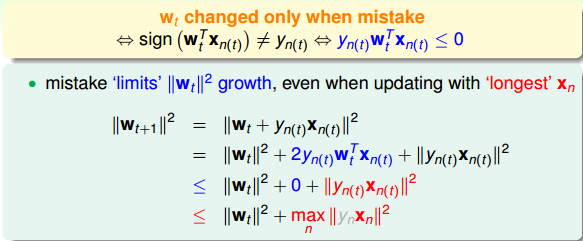
只会在分类错误的情况下更新,最终得到的相比的增量值不超过。也就是说,的增长被限制了,与向量长度不会差别太大!
如果令初始权值,那么经过T次错误修正后,有如下结论:
下面贴出来该结论的具体推导过程: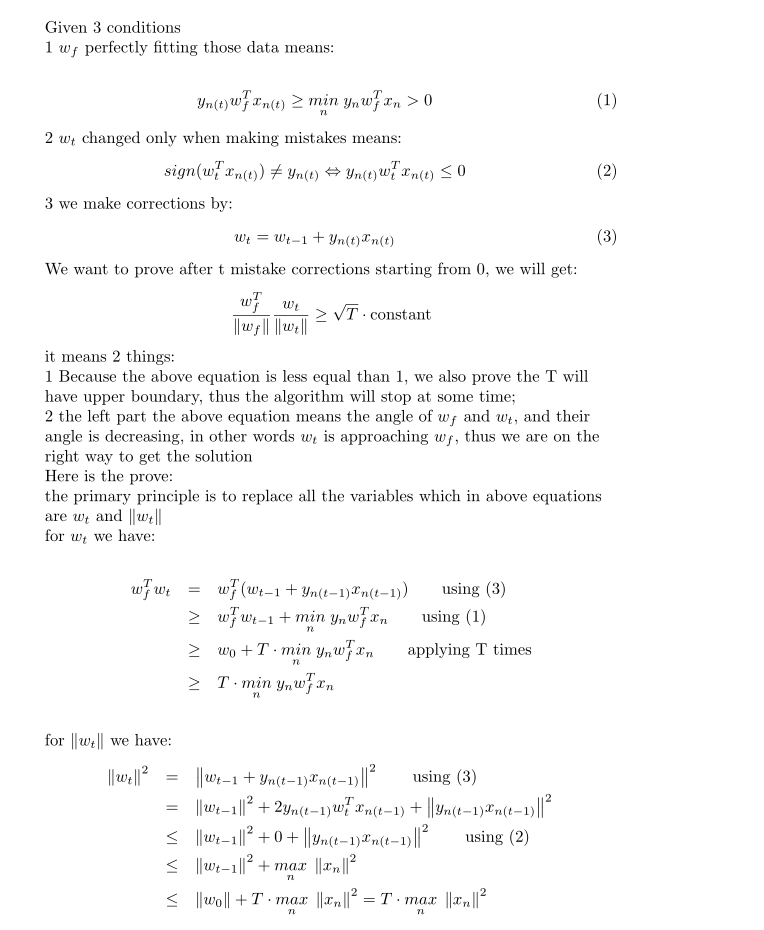
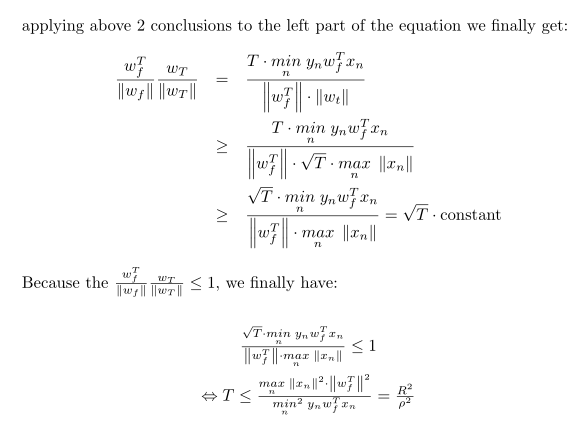
上述不等式左边其实是与夹角的余弦值,随着T增大,该余弦值越来越接近1,即与越来越接近。同时,需要注意的是,,也就是说,迭代次数T是有上界的。根据以上证明,我们最终得到的结论是:与的是随着迭代次数增加,逐渐接近的。而且,PLA最终会停下来(因为T有上界),实现对线性可分的数据集完全分类。
四、Non-Separable Data
上一部分,我们证明了线性可分的情况下,PLA是可以停下来并正确分类的,但对于非线性可分的情况,实际上并不存在,那么之前的推导并不成立,PLA不一定会停下来。所以,PLA虽然实现简单,但也有缺点: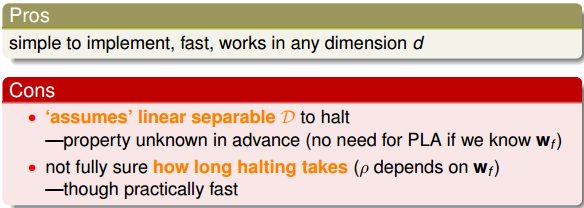
对于非线性可分的情况,我们可以把它当成是数据集D中掺杂了一下noise,事实上,大多数情况下我们遇到的D,都或多或少地掺杂了noise。这时,机器学习流程是这样的: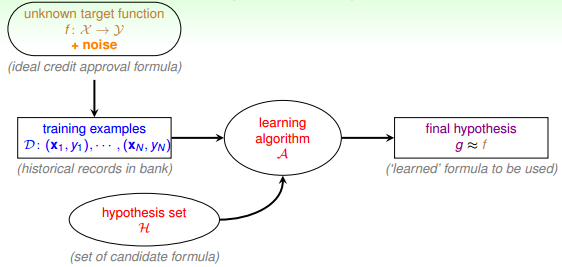
在非线性情况下,我们可以把条件放松,即不苛求每个点都分类正确,而是容忍有错误点,取错误点的个数最少时的权重w:
事实证明,上面的解是NP-hard问题,难以求解。然而,我们可以对在线性可分类型中表现很好的PLA做个修改,把它应用到非线性可分类型中,获得近似最好的g。
修改后的PLA称为Packet Algorithm。它的算法流程与PLA基本类似,首先初始化权重,计算出在这条初始化的直线中,分类错误点的个数。然后对错误点进行修正,更新w,得到一条新的直线,在计算其对应的分类错误的点的个数,并与之前错误点个数比较,取个数较小的直线作为我们当前选择的分类直线。之后,再经过n次迭代,不断比较当前分类错误点个数与之前最少的错误点个数比较,选择最小的值保存。直到迭代次数完成后,选取个数最少的直线对应的w,即为我们最终想要得到的权重值。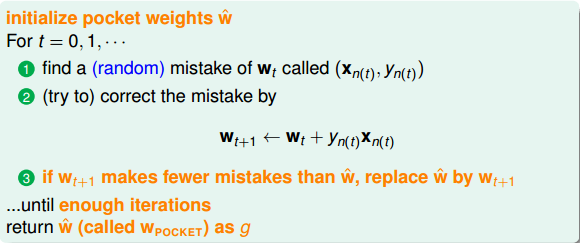
如何判断数据集D是不是线性可分?对于二维数据来说,通常还是通过肉眼观察来判断的。一般情况下,Pocket Algorithm要比PLA速度慢一些。
五、总结
本节课主要介绍了线性感知机模型,以及解决这类感知机分类问题的简单算法:PLA。我们详细证明了对于线性可分问题,PLA可以停下来并实现完全正确分类。对于不是线性可分的问题,可以使用PLA的修正算法Pocket Algorithm来解决。
注明:
笔记改编自红色石头博客
文章中所有的图片均来自台湾大学林轩田《机器学习基石》课程。



